Marcel Hallgarten
Hi, I'm a PhD student specializing in machine learning-based behavior planning for autonomous driving.
Interests: I'm particularly interested in robust imitation learning, which involves training an autonomous vehicle to imitate expert drivers and learn from their behavior in order to navigate complex traffic scenarios safely and efficiently.
Bio: I received my B.Sc. in Mechanical Engineering in 2019 at Karlsruhe Institute of Technology (KIT) as one of the best four graduates of the year. M.Sc. was centered around machine learning, machine vision and vehicle dynamics and I graduated in 2021 with distinction. In 2021 I started my PhD in Computer Science at University of Tübingen under the supervision of Prof. Dr. Andreas Zell and in collaboration with Bosch Corporate Resarch.
For any inquiries, feel free to reach out to me via mail!
Mail Twitter Scholar Github LinkedIn

Publications
Daniel Dauner, Marcel Hallgarten, Tianyu Li, Xinshuo Weng, Zhiyu Huang, Zetong Yang, Hongyang Li, Igor Gilitschenski, Boris Ivanovic, Marco Pavone, Andreas Geiger, Kashyap Chitta
arXiv.org, 2024
Abs / Paper / Supplementary / Code /
Marcel Hallgarten, Julian Zapata, Martin Stoll, Katrin Renz, Andreas Zell
arXiv.org, 2024
Abs / Paper / Code /
@article{hallgarten2024can,
author = {Marcel Hallgarten and Julian Zapata and Martin Stoll and Katrin Renz and Andreas Zell},
title = {Can Vehicle Motion Planning Generalize to Realistic Long-tail Scenarios?},
booktitle = {arXiv.org},
year = {2024},
}
Steffen Hagedorn*, Marcel Hallgarten*, Martin Stoll, Alexandru Condurache
IEEE Transactions on Intelligent Vehicles, 2024
Abs / Paper /
@article{hagedorn2024integration,
author = {Steffen Hagedorn and Marcel Hallgarten and Martin Stoll and Alexandru Condurache},
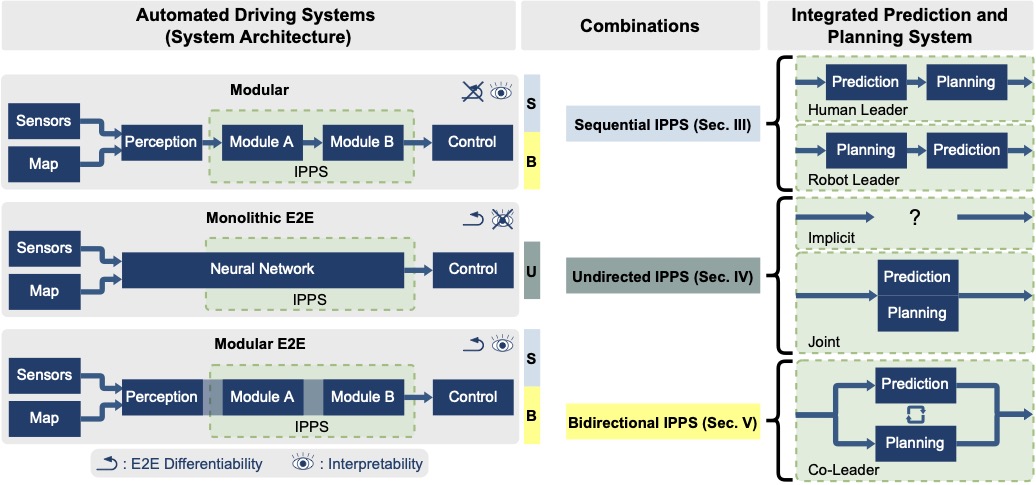
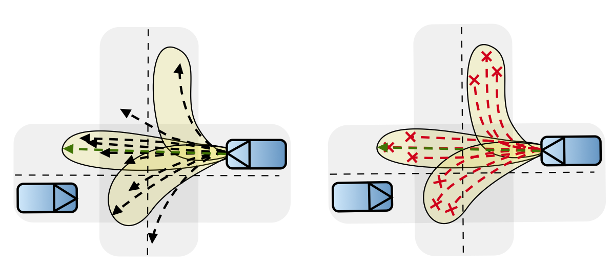
title = {The Integration of Prediction and Planning in Deep Learning Automated Driving Systems: A Review},
booktitle = {IEEE Transactions on Intelligent Vehicles},
year = {2024},
}
Faris Janjoš, Marcel Hallgarten, Anthony Knittel, Maxim Dolgov, Andreas Zell, Marius Zöllner
ECCV Workshop: ROAD++: The Third Workshop & Challenge: Event Detection for Situation Awareness in Autonomous Driving, 2024
Abs / Paper / Code /
@article{janjovs2023conditional,
author = {Faris Janjoš and Marcel Hallgarten and Anthony Knittel and Maxim Dolgov and Andreas Zell and Marius Zöllner},
title = {Conditional unscented autoencoders for trajectory prediction},
booktitle = {ECCV Workshop: ROAD++: The Third Workshop & Challenge: Event Detection for Situation Awareness in Autonomous Driving},
year = {2024},
}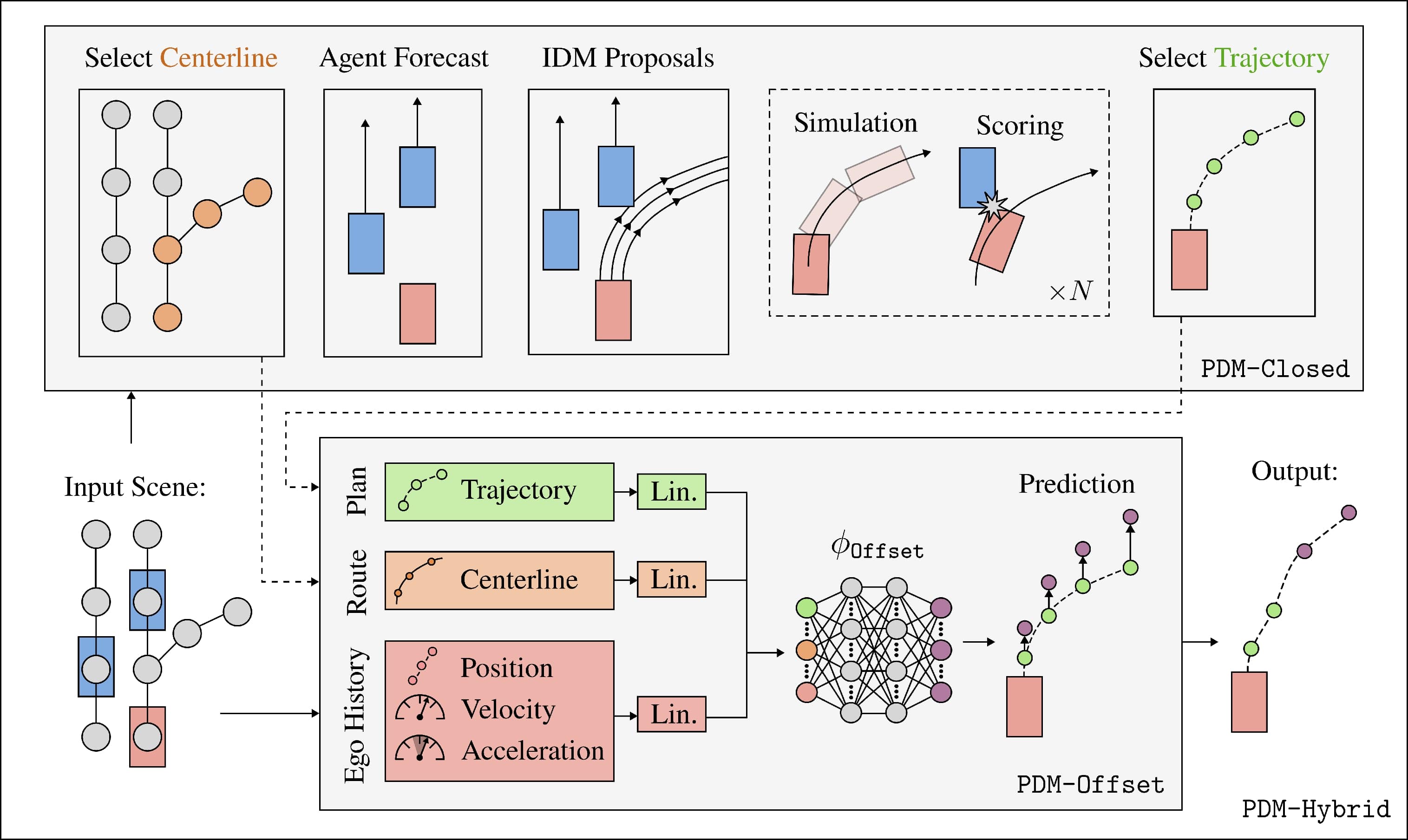
Daniel Dauner, Marcel Hallgarten, Andreas Geiger, Kashyap Chitta
Conference on Robot Learning, 2023
Abs / Paper / Supplementary / Video / Poster / Code /
@inproceedings{dauner2023parting,
author = {Daniel Dauner and Marcel Hallgarten and Andreas Geiger and Kashyap Chitta},
title = {Parting with misconceptions about learning-based vehicle motion planning},
booktitle = {Conference on Robot Learning},
year = {2023},
}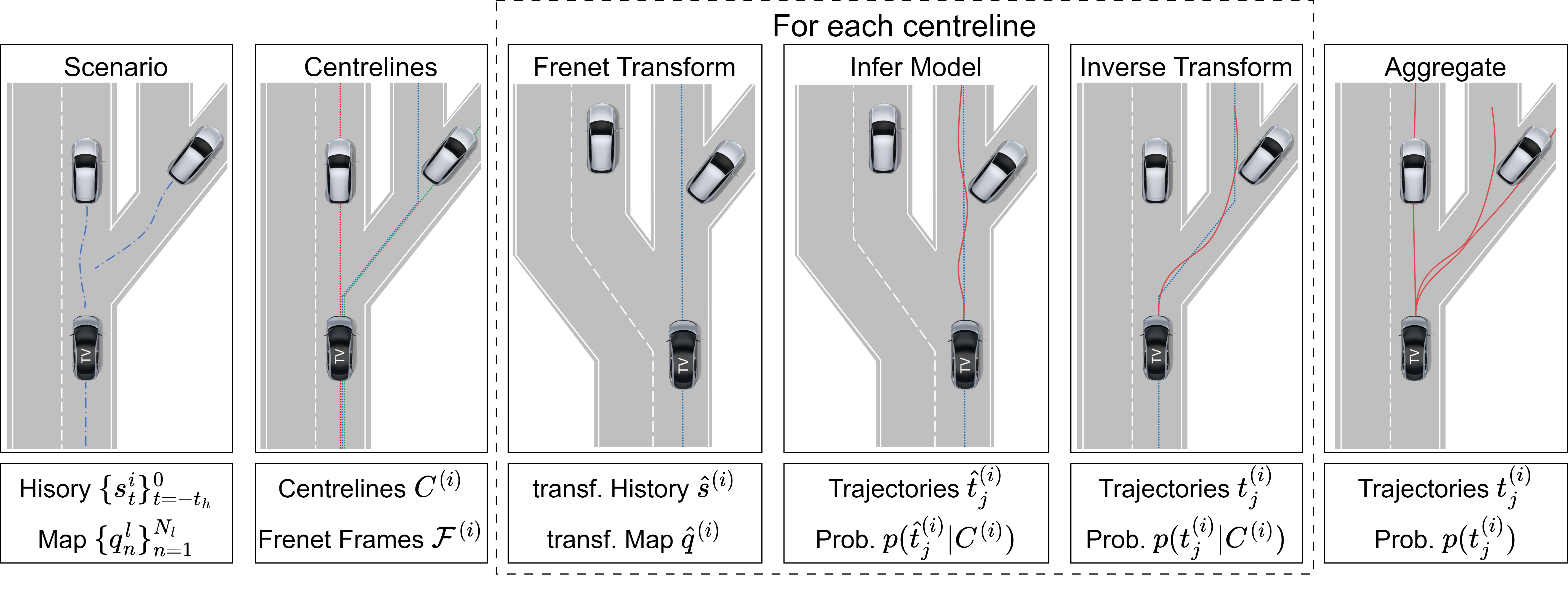
Marcel Hallgarten, Ismail Kisa, Martin Stoll, Andreas Zell
2024 IEEE Intelligent Vehicles Symposium (IV), 2024
Abs / Paper / Supplementary /
@inproceedings{hallgarten2024stay,
author = {Marcel Hallgarten and Ismail Kisa and Martin Stoll and Andreas Zell},
title = {Stay on track: A frenet wrapper to overcome off-road trajectories in vehicle motion prediction},
booktitle = {2024 IEEE Intelligent Vehicles Symposium (IV)},
year = {2024},
}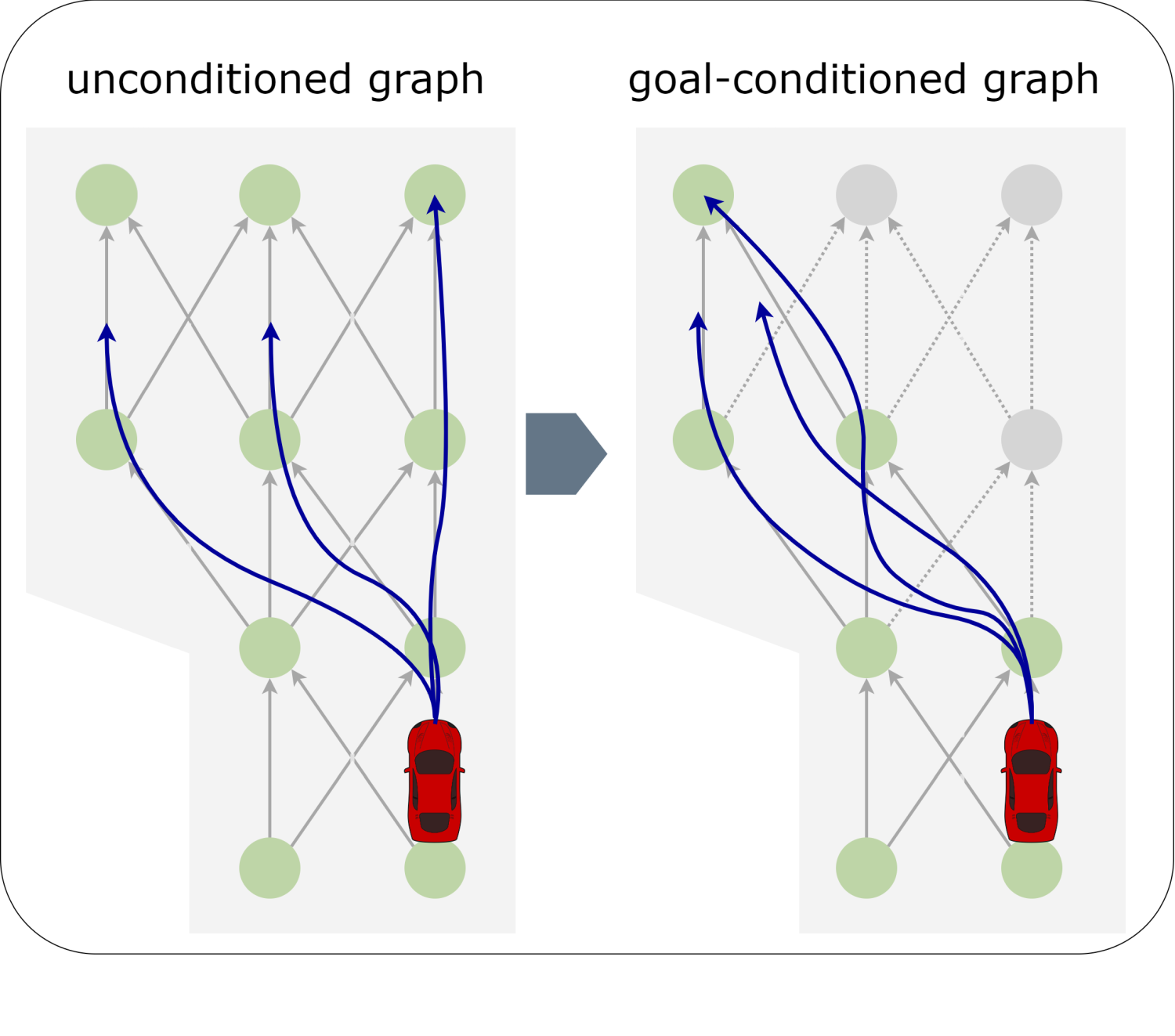
Marcel Hallgarten, Martin Stoll, Andreas Zell
2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC), 2023
Abs / Paper /
@inproceedings{hallgarten2023prediction,
author = {Marcel Hallgarten and Martin Stoll and Andreas Zell},
title = {From prediction to planning with goal conditioned lane graph traversals},
booktitle = {2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC)},
year = {2023},
}Teaching

University of Tuebingen, Fall 2023

University of Tuebingen, Spring 2023

University of Tuebingen, Fall 2022
University of Tuebingen, Spring 2022
University of Tuebingen, Fall 2021
Homepage Template
This page is based on the template of Michael Niemeyer. Checkout his GitHub repository for instructions on how to use it.