Marcel Hallgarten
Hi, I'm Marcel. I'm an AI researcher who enjoys taking ownership and leading teams and projects. I am passionate about turning cutting-edge machine learning research into impactful real-world systems. My background spans autonomous driving, generative AI, robotics, and AI strategy, with a particular interest in bridging research, engineering, and leadership.
Interests: My work has focused on machine learning for autonomous driving, including behavior planning, trajectory prediction, simulation, and evaluation. More recently, I've expanded into generative AI, agentic systems, and robotics, while exploring how AI technologies can successfully transition from research into industrial applications. I enjoy building open-source software, leading interdisciplinary projects, and helping teams bring ambitious ideas to life.
Bio: I received my B.Sc. in Mechanical Engineering in 2019 at Karlsruhe Institute of Technology (KIT) as one of the best four graduates of the year. I completed my M.Sc. with distinction in 2021, specializing in machine learning and data science. I earned my Ph.D. in Computer Science at the University of Tübingen in collaboration with Bosch Corporate Research. My dissertation, Data-driven Behavior and Motion Planning for Autonomous Driving in Interactive Urban Environments, focused on learning-based behavior and motion planning for autonomous driving. Today, I am part of Bosch's Junior Managers Program, where I work on AI strategy, product management, and robotics while developing as a technology leader.
For any inquiries, feel free to reach out to me via mail!
Mail Twitter Scholar Github LinkedIn

Publications
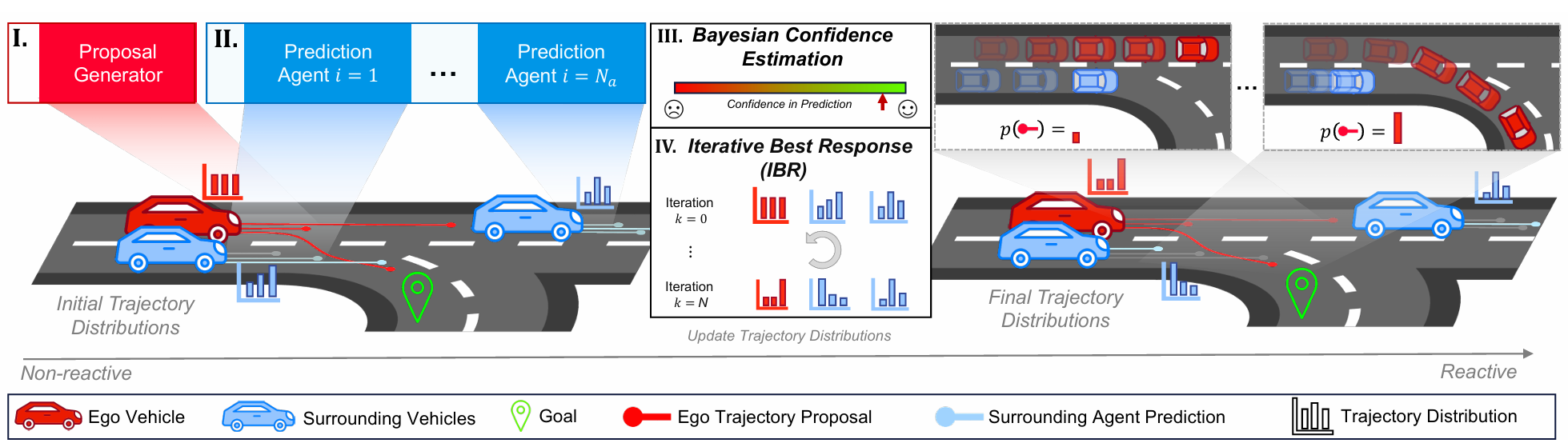
Aron Distelzweig, Yiwei Wang, Faris Janjoš, Marcel Hallgarten, Mihai Dobre, Alexander Langmann, Joschka Boedecker, Johannes Betz
Accepted at European Conference on Computer Vision (ECCV), 2025
Abs / Paper /
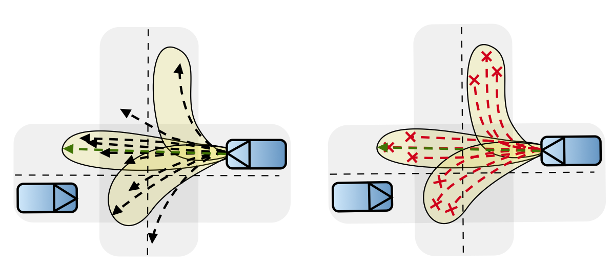
@inproceedings{distelzweig2025driving,
author = {Aron Distelzweig and Yiwei Wang and Faris Janjoš and Marcel Hallgarten and Mihai Dobre and Alexander Langmann and Joschka Boedecker and Johannes Betz},
title = {Driving is a Game: Combining Planning and Prediction with Bayesian Iterative Best Response},
booktitle = {Accepted at European Conference on Computer Vision (ECCV)},
year = {2025},
}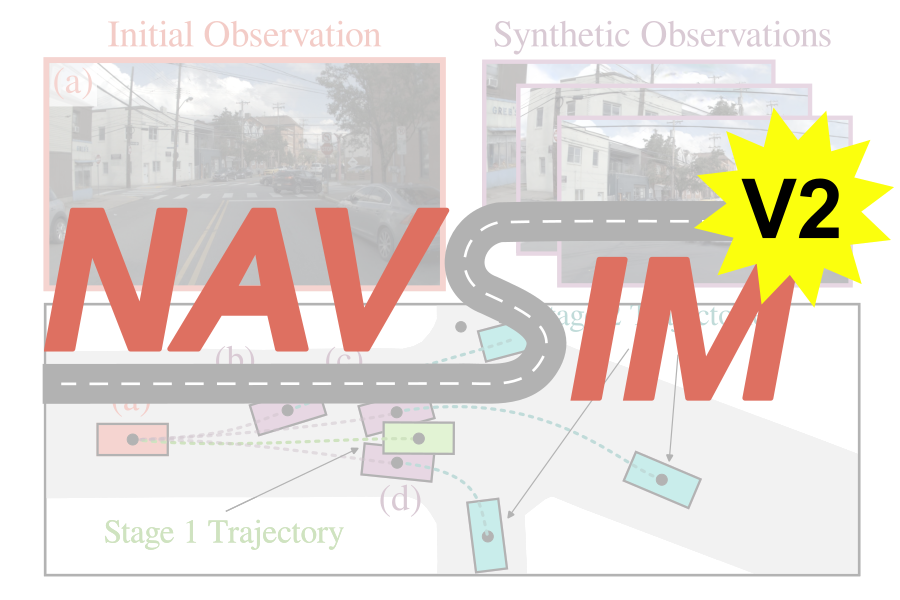
Wei Cao, Marcel Hallgarten, Tianyu Li, Daniel Dauner, Xunjiang Gu, Caojun Wang, Yakov Miron, Marco Aiello, Hongyang Li, Igor Gilitschenski, Boris Ivanovic, Marco Pavone, Andreas Geiger, Kashyap Chitta
Conference on Robot Learning (CoRL), 2025
Abs / Paper / Supplementary / Code /
@inproceedings{Cao2025CORL,
author = {Wei Cao and Marcel Hallgarten and Tianyu Li and Daniel Dauner and Xunjiang Gu and Caojun Wang and Yakov Miron and Marco Aiello and Hongyang Li and Igor Gilitschenski and Boris Ivanovic and Marco Pavone and Andreas Geiger and Kashyap Chitta},
title = {Pseudo-Simulation for Autonomous Driving},
booktitle = {Conference on Robot Learning (CoRL)},
year = {2025},
}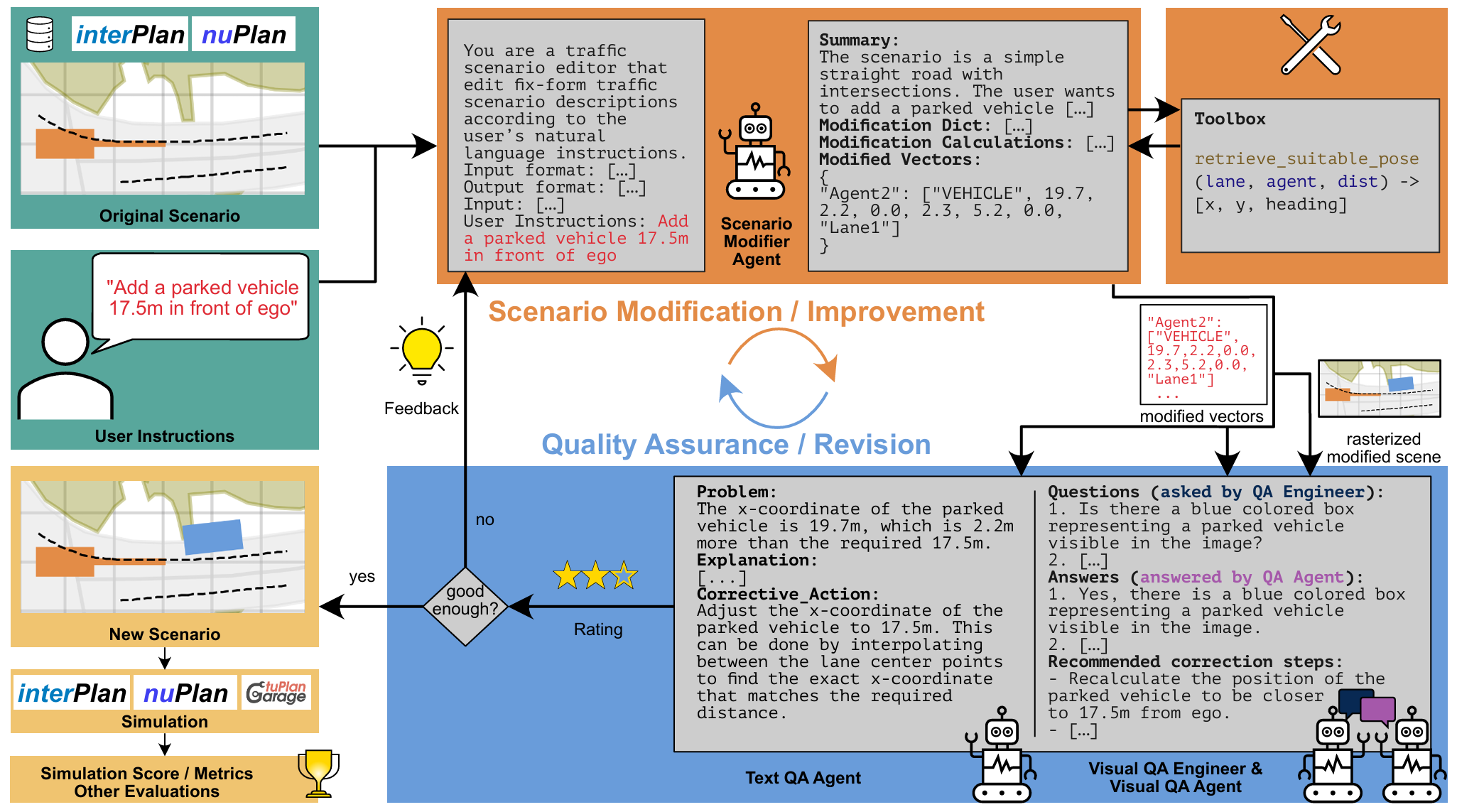
Yu Yao, Salil Bhatnagar, Markus Mazzola, Vasileios Belagiannis, Igor Gilitschenski, Luigi Palmieri, Simon Razniewski, Marcel Hallgarten
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
Abs / Paper /
@inproceedings{yao2025agents,
author = {Yu Yao and Salil Bhatnagar and Markus Mazzola and Vasileios Belagiannis and Igor Gilitschenski and Luigi Palmieri and Simon Razniewski and Marcel Hallgarten},
title = {AGENTS-LLM: Augmentative GENeration of Challenging Traffic Scenarios with an Agentic LLM Framework},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2025},
}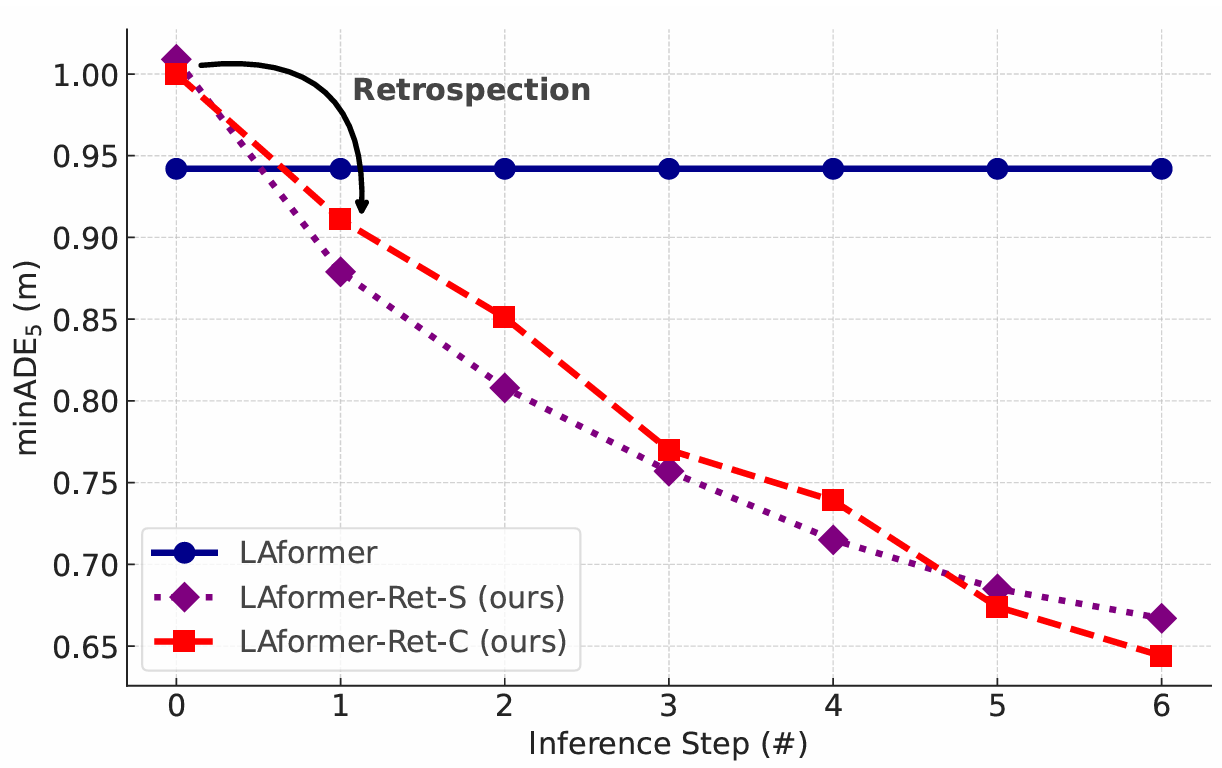
Steffen Hagedorn, Aron Distelzweig, Marcel Hallgarten, Alexandru Condurache
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
Abs / Paper /
@inproceedings{hagedorn2025learning,
author = {Steffen Hagedorn and Aron Distelzweig and Marcel Hallgarten and Alexandru Condurache},
title = {Learning through retrospection: Improving trajectory prediction for automated driving with error feedback},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2025},
}
Daniel Dauner, Marcel Hallgarten, Tianyu Li, Xinshuo Weng, Zhiyu Huang, Zetong Yang, Hongyang Li, Igor Gilitschenski, Boris Ivanovic, Marco Pavone, Andreas Geiger, Kashyap Chitta
Advances in Neural Information Processing Systems (NeurIPS), 2024
Abs / Paper / Supplementary / Code /
Marcel Hallgarten, Julian Zapata, Martin Stoll, Katrin Renz, Andreas Zell
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
Abs / Paper / Code /
@inproceedings{hallgarten2024can,
author = {Marcel Hallgarten and Julian Zapata and Martin Stoll and Katrin Renz and Andreas Zell},
title = {Can Vehicle Motion Planning Generalize to Realistic Long-tail Scenarios?},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2024},
}
Steffen Hagedorn*, Marcel Hallgarten*, Martin Stoll, Alexandru Condurache
IEEE Transactions on Intelligent Vehicles, 2024
Abs / Paper /
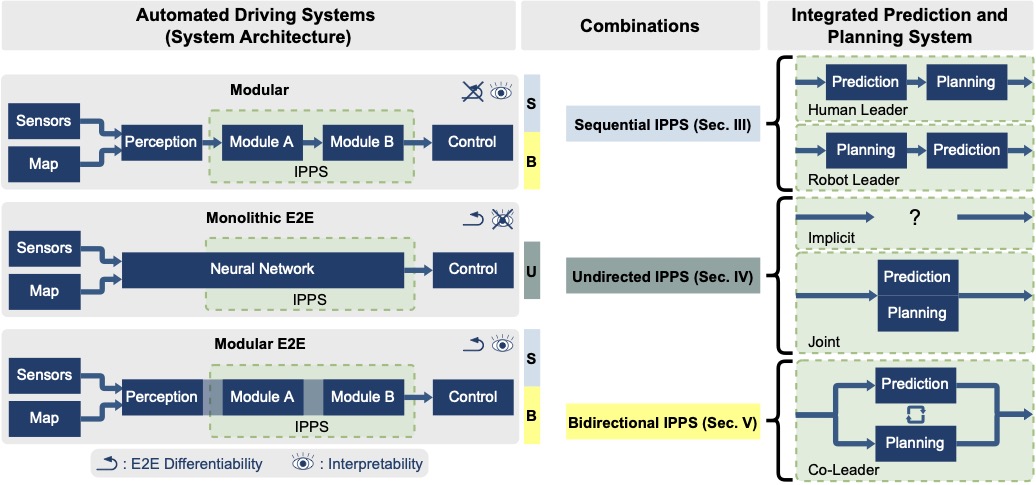
@inproceedings{hagedorn2024integration,
author = {Steffen Hagedorn and Marcel Hallgarten and Martin Stoll and Alexandru Condurache},
title = {The Integration of Prediction and Planning in Deep Learning Automated Driving Systems: A Review},
booktitle = {IEEE Transactions on Intelligent Vehicles},
year = {2024},
}
Faris Janjoš, Marcel Hallgarten, Anthony Knittel, Maxim Dolgov, Andreas Zell, J Zöllner
European Conference on Computer Vision (ECCV), 2024
Abs / Paper / Code /
@inproceedings{janjovs2024conditional,
author = {Faris Janjoš and Marcel Hallgarten and Anthony Knittel and Maxim Dolgov and Andreas Zell and J Zöllner},
title = {Conditional unscented autoencoders for trajectory prediction},
booktitle = {European Conference on Computer Vision (ECCV)},
year = {2024},
}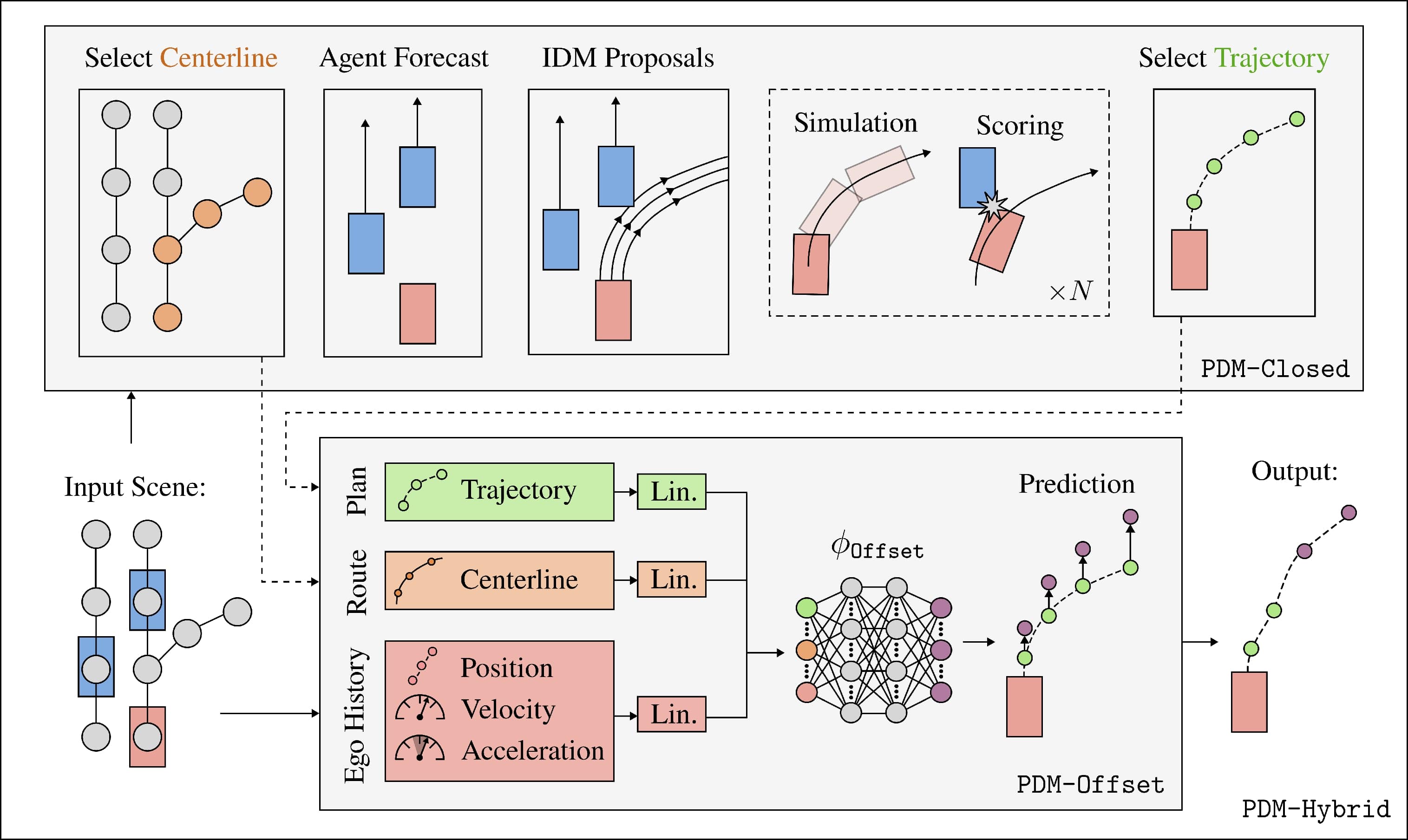
Daniel Dauner, Marcel Hallgarten, Andreas Geiger, Kashyap Chitta
Conference on Robot Learning (CoRL), 2023
Abs / Paper / Supplementary / Video / Poster / Code /
@inproceedings{dauner2023parting,
author = {Daniel Dauner and Marcel Hallgarten and Andreas Geiger and Kashyap Chitta},
title = {Parting with misconceptions about learning-based vehicle motion planning},
booktitle = {Conference on Robot Learning (CoRL)},
year = {2023},
}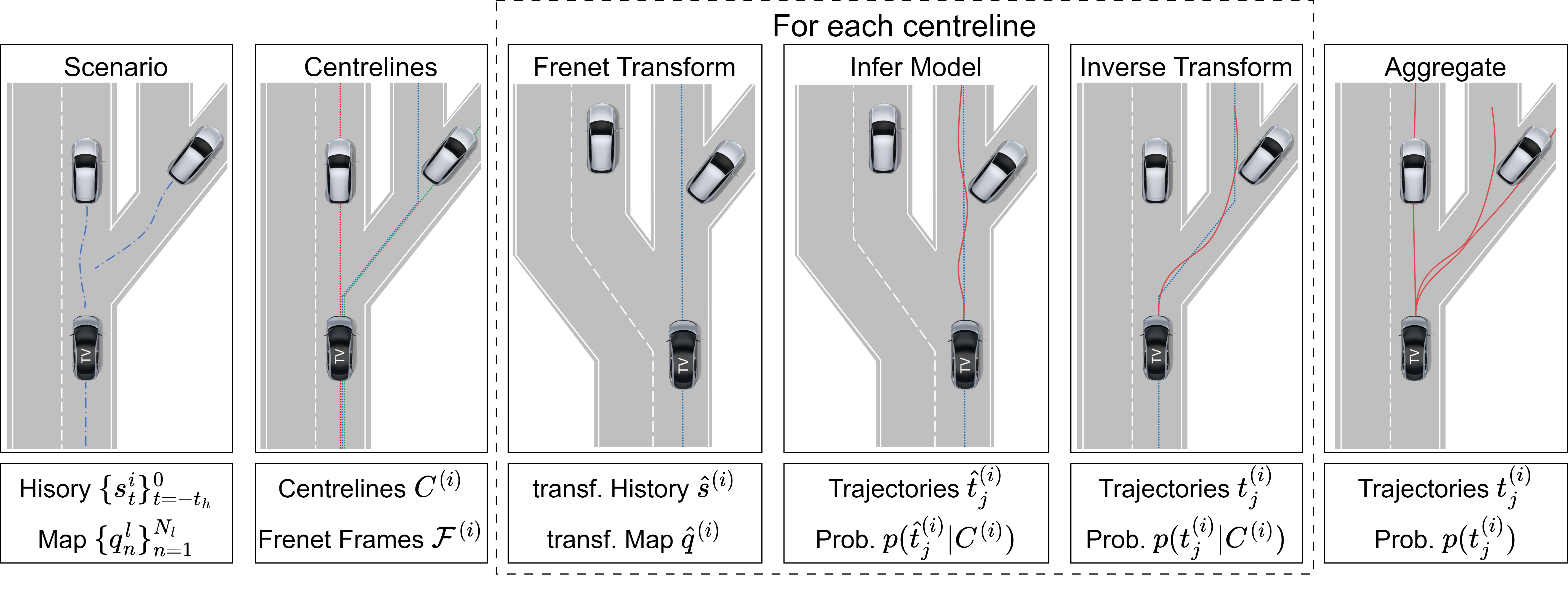
Marcel Hallgarten, Ismail Kisa, Martin Stoll, Andreas Zell
IEEE Intelligent Vehicles Symposium (IV), 2024
Abs / Paper / Supplementary /
@inproceedings{hallgarten2024stay,
author = {Marcel Hallgarten and Ismail Kisa and Martin Stoll and Andreas Zell},
title = {Stay on track: A frenet wrapper to overcome off-road trajectories in vehicle motion prediction},
booktitle = {IEEE Intelligent Vehicles Symposium (IV)},
year = {2024},
}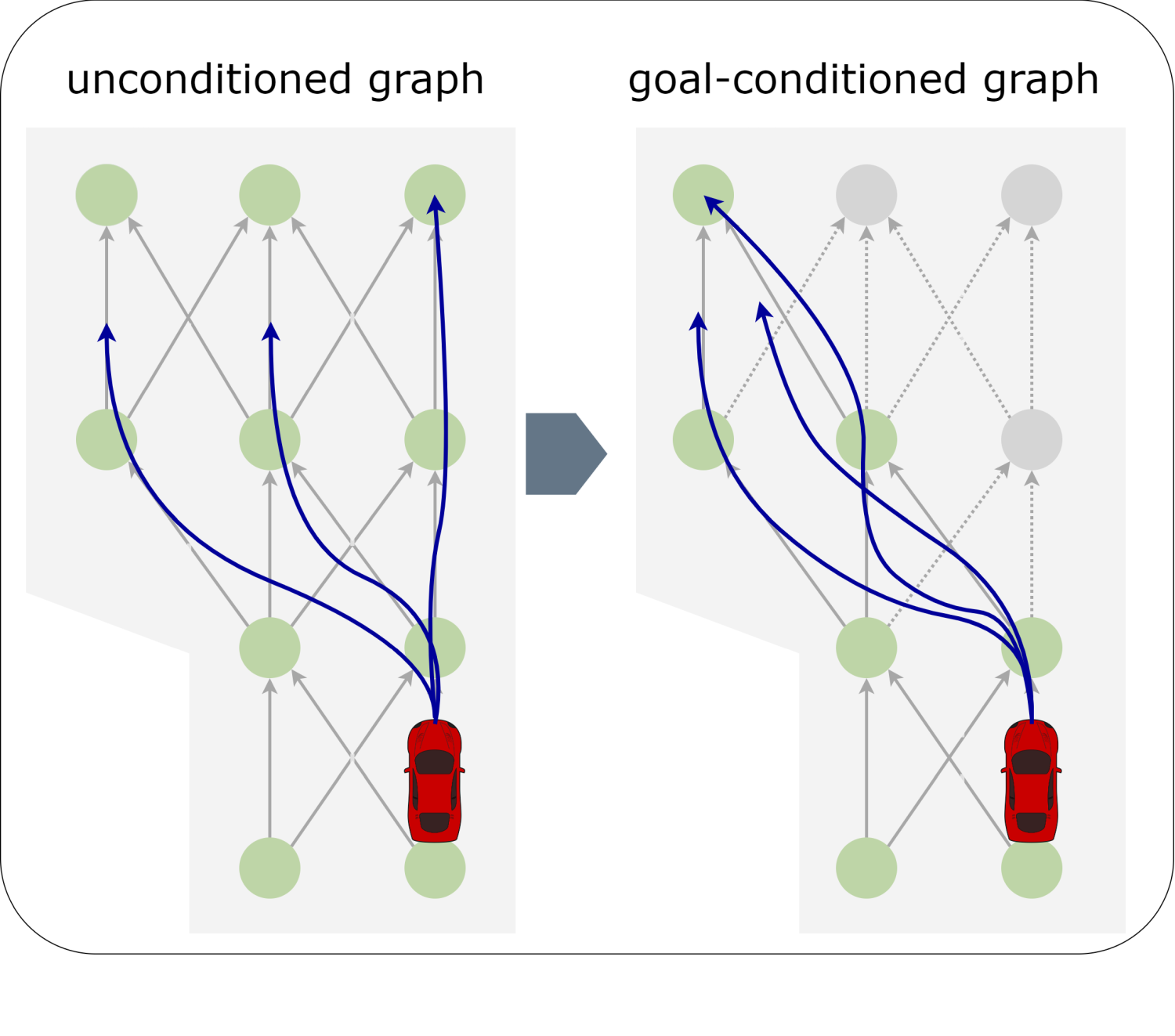
Marcel Hallgarten, Martin Stoll, Andreas Zell
IEEE 26th International Conference on Intelligent Transportation Systems (ITSC), 2023
Abs / Paper /
@inproceedings{hallgarten2023prediction,
author = {Marcel Hallgarten and Martin Stoll and Andreas Zell},
title = {From prediction to planning with goal conditioned lane graph traversals},
booktitle = {IEEE 26th International Conference on Intelligent Transportation Systems (ITSC)},
year = {2023},
}Teaching

University of Tuebingen, Fall 2023

University of Tuebingen, Spring 2023

University of Tuebingen, Fall 2022
University of Tuebingen, Spring 2022
University of Tuebingen, Fall 2021
Homepage Template
This page is based on the template of Michael Niemeyer. Checkout his GitHub repository for instructions on how to use it.